
Robot Vision
ロボットビジョンシステム
ロボットビジョンシステムは、ロボットに対し、対象物の位置や形状などの認識情報を提供する画像処理システムです。
マイクロ・テクニカのロボットビジョンシステムでは、3次元画像技術や2次元画像処理に加え、AIによる学習アルゴリズムも活用しています。
これにより、通常の箱や袋だけでなく、大きさや色がランダムな箱や、形が不安定で変形した袋など、認識が難しい対象物にも柔軟に対応可能です。

Robot Visionのお知らせ


箱デパレタイズ ビジョンシステム

デパレタイズシステムとは、ロボットを用いてパレットやかご車からワークを自動で荷卸しする装置です。ここにマイクロ・テクニカのロボットビジョンを組み込むことで、自由度を広げ、確実性を底上げします。
箱ワークを対象としたデパレタイズ用のビジョンシステムです。最上面の各箱の3次元位置を把握し、確実な荷卸しに必要なピッキングポイントを特定します。ランダムに積まれた箱にも対応しており、PPバンドテープ付き・無し、黒テープ、透明テープなど、さまざまな種類の箱を高精度に認識できます。
袋デパレタイズ ビジョンシステム

パレット上に積まれた袋を対象にしたデパレシステム向けのロボットビジョンです。重なり合いや整列に乱れがある袋、形状が不安定な袋、絵柄のない無地の袋などの認識が可能です。
重い材料袋などのデパレタイズの自動化を実現するロボットビジョンシステムです。
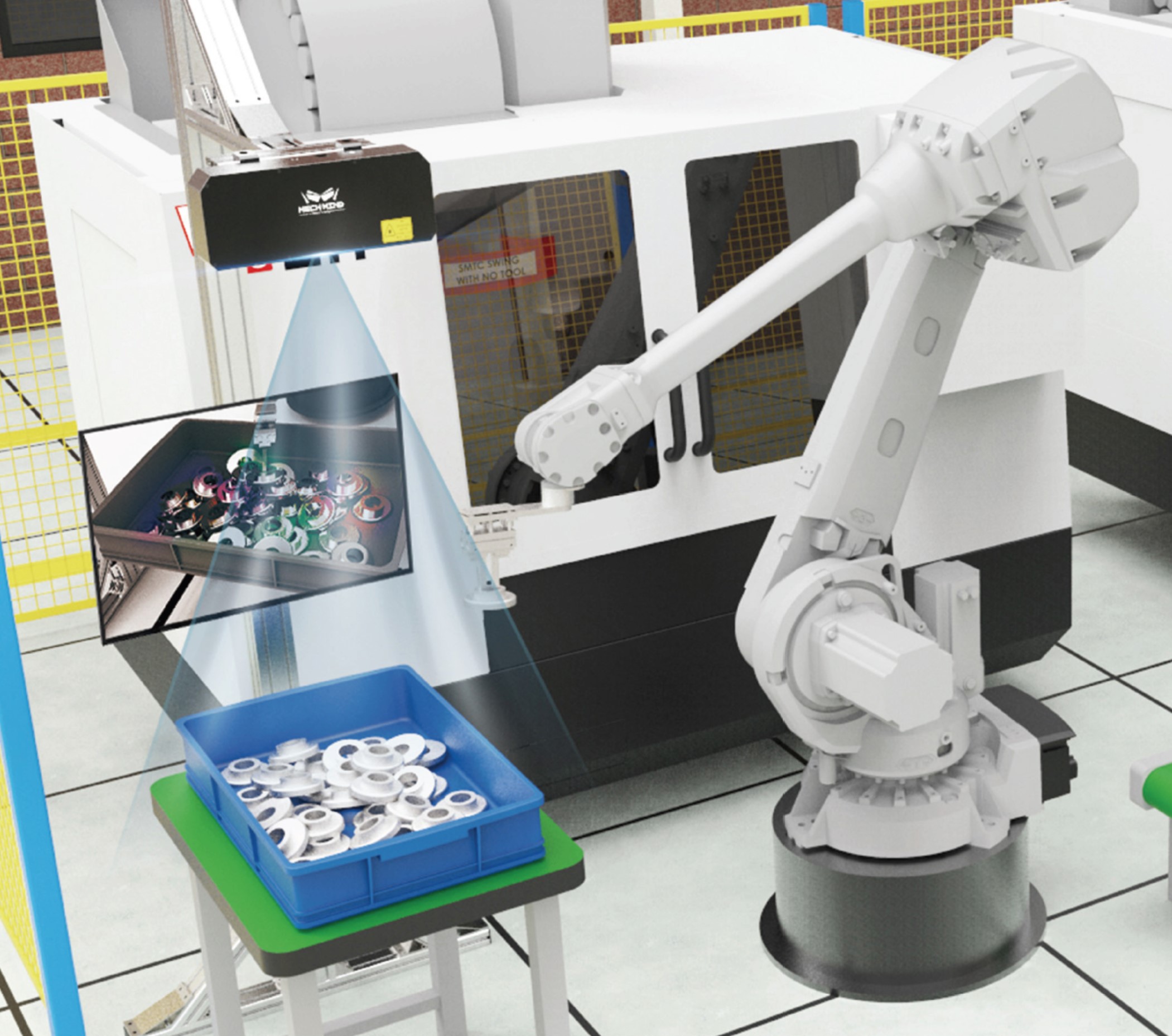
ピースピッキング ビジョンシステム

各種機械部品や小箱、封筒といった小さなワークを画像認識し、ピッキングを自動化するビジョンシステムです。
複雑な形状のワークが多いため、3次元認識だけでなく、AIや2次元画像処理を組み合わせて画像認識を行います。
Mech-Mind ビジョンシステム
Mech-Mind社の3Dカメラ及びソフトウェアを活用して、ロボットビジョンシステムを作成します。Mech-Mindのもつ3次元画像認識やAI処理を駆使して、ピッキング用ビジョンシステムなどを実現します。
Mech-Mindを導入したいが、自力でのシステム構築に自信がないユーザー様にもおすすめです。
ロボットピッキングセル

ロボットピッキングセルは、ロボットと、3次元ビジョンユニット、ビジョンシステムが一つにパッケージ化された弊社オリジナルのパッケージセルです。箱デパレ、袋デパレ、パレタイズ、ピースピッキングなどの様々な用途でご導入いただけます。安定したパフォーマンスと優れたコストパフォーマンスを実現しました。
カタログ・資料ダウンロード/
お問い合わせはこちらから
購入ご検討の参考に
ご質問・ご相談などお気軽に