- TOP
- 取扱製品
- Robot Vision
- AI箱デパレシステム
AI箱デパレシステム
箱デパレタイジング用ロボットビジョン
3D+AI処理で、ランダムな箱ワークを認識可能
3Dカメラで取得したデータを使った3D認識。そしてカラーカメラ画像を学習したAI認識。
マイクロ・テクニカの箱デパレタイズ用ビジョンシステムは、これらの技術を組み合わせてランダムな箱ワークの認識を実現しています。
認識対象の箱ワークに、サイズ・色・表面の印刷などが異なるものが混ざっていても、1つ1つの箱ワークを別個に認識してピッキングポイントを検出します。
様々な箱が入り混じる宅急便はもちろん、パレット単位でワークの箱の種類が変わる物流の現場に最適なビジョンシステムです

動画
仕様
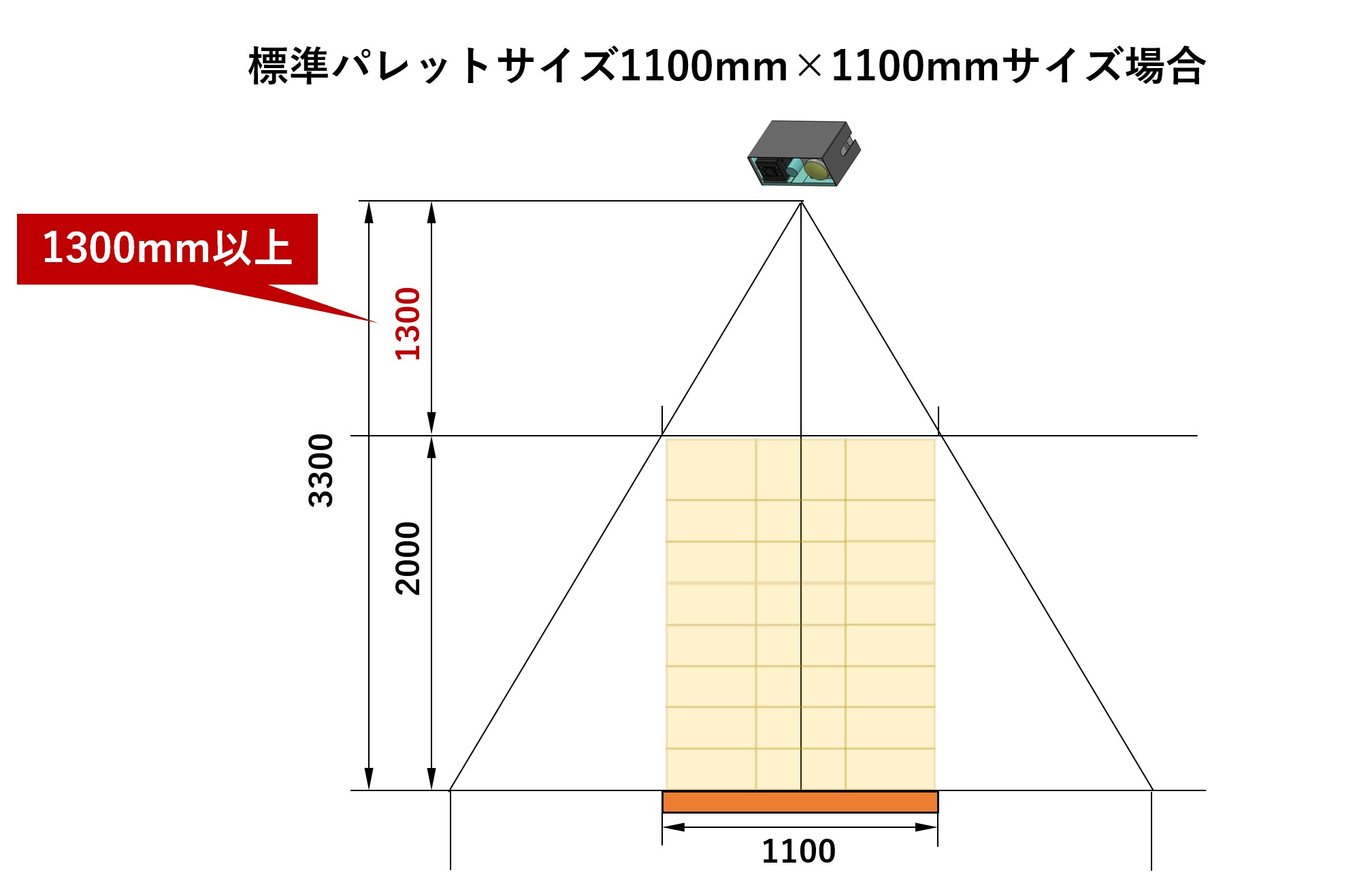
箱デパレは主にパレットやかご車からのロボットで荷卸しを行うシステムです。弊社のビジョンシステムでは、最上面の個々の箱の3次元の位置を認識してピッキングポイントをロボットコントローラやPLCなどに送信します。ピッキングポイントの座標系は、カメラ座標をロボット座標に変換して送信するのが一般的ですが、ユーザー座標系(ワールド座標)でも送信可能です。またロボットハンドの形状にあわせて、かご車やパレット・他に箱などにハンドが衝突しないように、ハンドの干渉チェックを行った上で有効なピッキングを送信します。
| 撮像距離・視野範囲(参考) *右図の参考以外の撮像距離と視野範囲でも対応可能です。詳細は、弊社までお問い合わせください。 |
 |
| ビジョンユニット選択 | 固定カメラ又はハンドアイカメラの選択 |
| ビジョンユニット構成 | 3Dカメラ・2Dカメラ・LED照明・コントロールボックス・PC |
| PC | OS:Win10以上, CPU:Corei7以上, メモリ:16GB以上, GPU付き推奨 |
| ロボットキャリブレーション | 機能有り(複数のロボットメーカーに対応) |
| ロボット接続 | PLC(オムロン・三菱)経由での接続 *ロボットコントローラへの接続も可能。詳細はお問い合わせください。 |
| ハンド干渉チェック |
機能あり(カゴ車干渉チェックにも対応) |
| 備考 | 仕様は予告なく変更される場合があります。 |
解説
箱デパレ AIロボットビジョン
(2016年~現在)
ランダムワーク対応、PPバンド・透明テープ、ほぼ全ての箱の認識が可能!
2010年より弊社にて多様な技術手法で様々な箱の認識を行い、現在は箱(矩形)におけるほぼ全てのワークを絵柄などの事前登録マスターを使用せず、認識することが可能となりました。
弊社の従来の技術にDeepLearningを組み合わせ、ランダムな箱を認識しロボットピッキングを行います。
下記のような様々な条件の箱が混載していても認識が可能です。
- 大きさの違う箱
- 封をするテープの色が様々な箱(透明テープ含む)
- 表面の印刷が様々な箱
- PPバンドが巻かれている箱
- PPハンドが巻かれておりテープが貼っていない箱
箱デパレ用 AIビジョンシステム
デパレ用箱認識 新アルゴリズム(MOP)を開発
(2019年~)
同一種類・レイヤー積み対応、絵柄登録不要!
箱及び矩形に分類するワークの認識アルゴリズムとして数理最適化(MOP)アルゴリズムを新たに開発。
今回の箱認識アルゴリズムは、箱の絵柄などの情報は一切不要。箱サイズ情報のみを使用して、カメラで取得した3次元及び2次元の箱の形状から数学的手法と画像を認識を組合せて、箱の個々の認識を行うもので、ロバスト性に優れ、高速処理向きな認識アルゴリズムです。
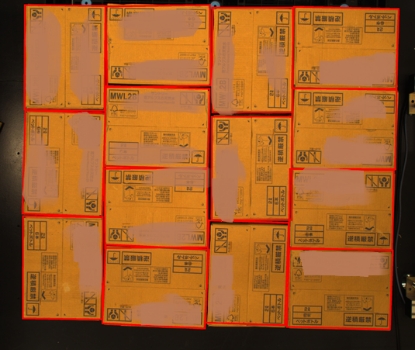
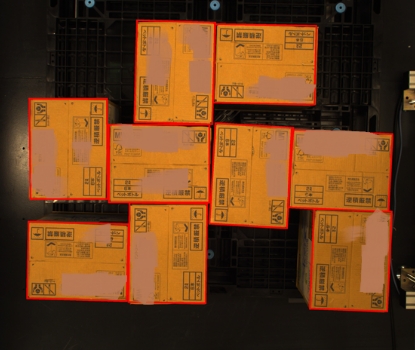
MOP認識アルゴリズムによる認識事例
箱上面の様々な積載パターンに対応可能で、認識速度も速く同一ワークに最適な認識手法です。
カタログ・資料ダウンロード/
お問い合わせはこちらから
購入ご検討の参考に
ご質問・ご相談などお気軽に